Φανταστείτε έναν εργαζόμενο σε ένα εργοστάσιο που στο τέλος της βάρδιας αφήνει ένα ημιτελές εξάρτημα σε κάποιο σημείο της αποθήκης. Την επόμενη μέρα θυμάται ακριβώς πού το άφησε και πηγαίνει κατευθείαν να το πάρει για να συνεχίσει τη δουλειά του.
Αν όμως ζητούσε από ένα ρομπότ να κάνει το ίδιο, τα πράγματα θα ήταν πολύ πιο δύσκολα. Τα περισσότερα ρομπότ δεν διαθέτουν τη δυνατότητα να συνδυάζουν πληροφορίες για τον χρόνο, τον χώρο και τα αντικείμενα με τον τρόπο που το κάνει ο ανθρώπινος εγκέφαλος.
Αυτό ακριβώς το πρόβλημα επιχειρούν να λύσουν ερευνητές του Τεχνολογικού Ινστιτούτου της Μασαχουσέτης (MIT) οι οποίοι, με επικεφαλής τον Luca Carlone, αναπληρωτή καθηγητή στο Τμήμα Αεροναυτικής και Αστροναυτικής του MIT (AeroAstro), ανέπτυξαν ένα νέο σύστημα μνήμης που επιτρέπει στα ρομπότ να θυμούνται λεπτομέρειες από το περιβάλλον τους και να τις ανακαλούν όταν χρειάζεται.
Πώς λειτουργεί η τεχνολογία
Η τεχνολογία αυτή θα μπορούσε στο μέλλον να επιτρέψει σε έναν εργαζόμενο να δώσει μια απλή εντολή όπως «πήγαινε να μου φέρεις το εξάρτημα που αρχίσαμε να συναρμολογούμε χθες το βράδυ» και ο ρομποτικός βοηθός να γνωρίζει ακριβώς τι ψάχνει και πού βρίσκεται αυτό που ψάχνει.
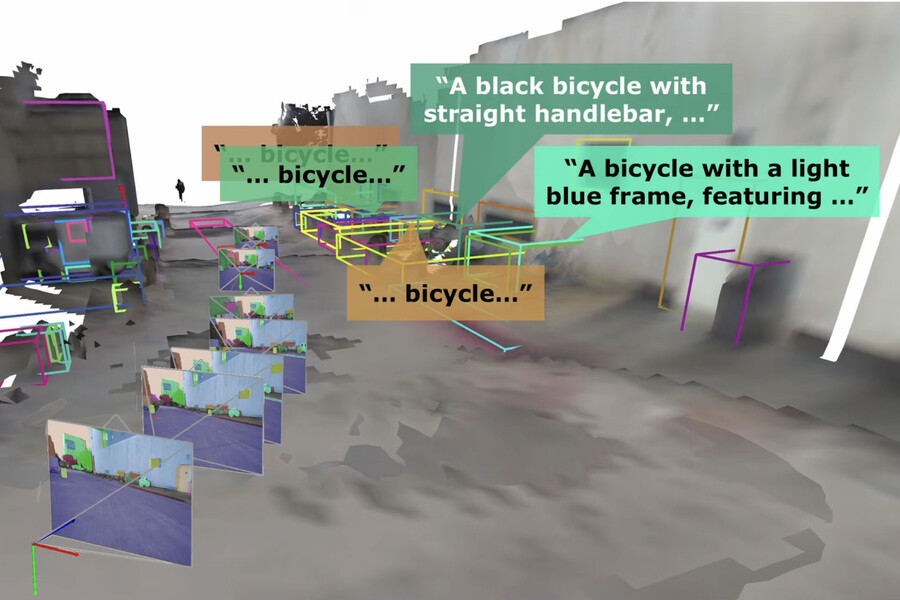
Το νέο σύστημα, που ονομάζεται DAAAM (Describe Anything, Anywhere, Anytime, at Any Moment), λειτουργεί σαν μια μακροπρόθεσμη μνήμη για τα ρομπότ. Καθώς τα ρομποτικά συστήματα κινούνται σε έναν χώρο, καταγράφουν όσα βλέπουν, δημιουργώντας έναν λεπτομερή χάρτη που δεν περιλαμβάνει μόνο τοποθεσίες αλλά και περιγραφές αντικειμένων.
Με απλά λόγια, το ρομπότ δεν θυμάται μόνο ότι είδε ένα ποδήλατο σε μια συγκεκριμένη θέση, αλλά και ότι ήταν κόκκινο, είχε σκασμένο λάστιχο και βρισκόταν δίπλα σε μια βάση ποδηλάτων έξω από ένα συγκεκριμένο κτίριο.
Η καινοτομία των ερευνητών είναι ότι κατάφεραν να συνδυάσουν προηγμένα συστήματα υπολογιστικής όρασης και ρομποτικής χαρτογράφησης, τα οποία αναγνωρίζουν και περιγράφουν αντικείμενα με τρισδιάστατους χάρτες που καταγράφουν με ακρίβεια τον χώρο. Έτσι δημιουργείται ένα είδος «έξυπνου χάρτη», όπου κάθε αντικείμενο συνδέεται με πληροφορίες που μπορούν να αναζητηθούν μέσω της φυσικής γλώσσας.
Πώς το DAAM λύνει το πρόβλημα ομαδοποιώντας τα αντικείμενα
Μέχρι σήμερα παρόμοια συστήματα λειτουργούσαν με πολύ αργό ρυθμό και ήταν ακατάλληλα για πρακτική χρήση. Ένα ρομπότ μπορεί να συναντήσει εκατοντάδες αντικείμενα μέσα σε λίγα λεπτά και η επεξεργασία όλων αυτών των δεδομένων απαιτούσε πολύ χρόνο.
Το DAAAM λύνει το πρόβλημα ομαδοποιώντας τα αντικείμενα που βρίσκονται το ένα κοντά στο άλλο και επιλέγοντας μόνο τις πιο χρήσιμες εικόνες για ανάλυση. Με αυτή τη μέθοδο η διαδικασία γίνεται έως και δέκα φορές ταχύτερη επιτρέποντας στο ρομπότ να ενημερώνει τη μνήμη του σε πραγματικό χρόνο.
Εξίσου σημαντική είναι και η δυνατότητα ανάκτησης των πληροφοριών. Όταν κάποιος κάνει μια ερώτηση, το σύστημα μπορεί να ψάξει στη μνήμη του με βάση λέξεις-«κλειδιά» ή συγκεκριμένες τοποθεσίες και να δώσει απάντηση μέσα σε λίγα δευτερόλεπτα.
Για παράδειγμα, αν του ζητηθεί να εντοπίσει ένα γλυπτό που είχε δει σε μια πανεπιστημιούπολη, μπορεί να αναζητήσει τη λέξη «γλυπτό» και να βρει αμέσως όλες τις σχετικές πληροφορίες.
Τί έδειξαν οι δοκιμές
Τα αποτελέσματα των δοκιμών ήταν ιδιαίτερα ενθαρρυντικά, καθώς το νέο σύστημα αποδείχθηκε από 21% έως 53% πιο ακριβές σε σχέση με άλλες σύγχρονες μεθόδους. Οι ερευνητές πιστεύουν ότι η τεχνολογία αυτή θα μπορούσε να αξιοποιηθεί όχι μόνο στη ρομποτική, αλλά και σε εφαρμογές επαυξημένης πραγματικότητας, στη βιομηχανία, στη συντήρηση εγκαταστάσεων και σε συστήματα πλοήγησης.
Ο στόχος τους είναι ακόμη πιο φιλόδοξος: να δημιουργήσουν ρομπότ που δεν θα θυμούνται απλώς πού βρίσκεται ένα αντικείμενο, αλλά και τι συνέβη γύρω του, πότε συνέβη και γιατί έχει σημασία.
Αν τα καταφέρουν, η εποχή όπου μια τεχνητή νοημοσύνη θα μπορεί να μας πει πού αφήσαμε τα κλειδιά μας ίσως να μην είναι και τόσο μακριά.